PuluTOF proceeding
PuluTOF - our 3D distance measurement system - has been in R&D for a few months, and it has fulfilled and partly exceeded the early expectations.
Even surprising ourselves, we dediced to roll out the first production batch sooner than anybody expected. This is not our final product: the first revision lacks many correction features we are still developing, and cannot completely replace the 2D scanning LIDAR, which is therefore still present in our first batch of production robots.
Shortly said, PULUTOF1 is great for obstacle avoidance and collision prevention, but not good enough for accurate mapping alone.
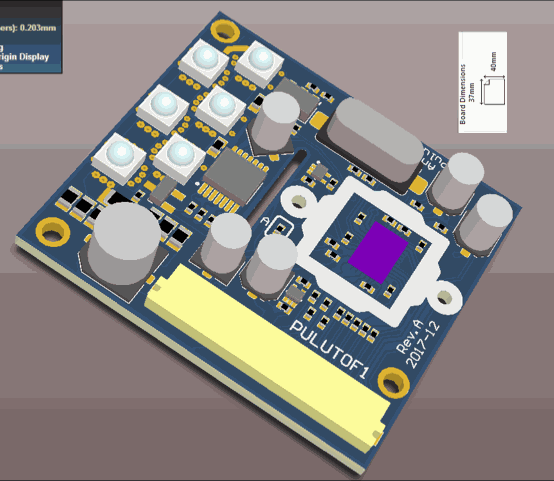
This early cheap sensor supplements the 2D LIDAR by providing large view, totaling to 100 degrees vertical and 160 degrees horizontal, divided in four 100x40 degree beams located in the most important areas around the robot - helping avoid any collisions, detect stairways, etc. while going forward or turning around.
When the 3DTOF design work is finished, we expect the sensor - PULUTOF2 - to provide SLAM-grade vision - 100 degrees vertical, 360 degrees horizontal - around the robot in 3D without any moving parts up to 7-15 meters.
The best part is, once the 3DTOF is fully designed, the production cost for Pulu M and S will go down a bit because we can ditch the 2D scanning LIDAR, an expensive part providing only 500 samples per second in a 2D plane, while our own provides 500000 samples per second in 3D!
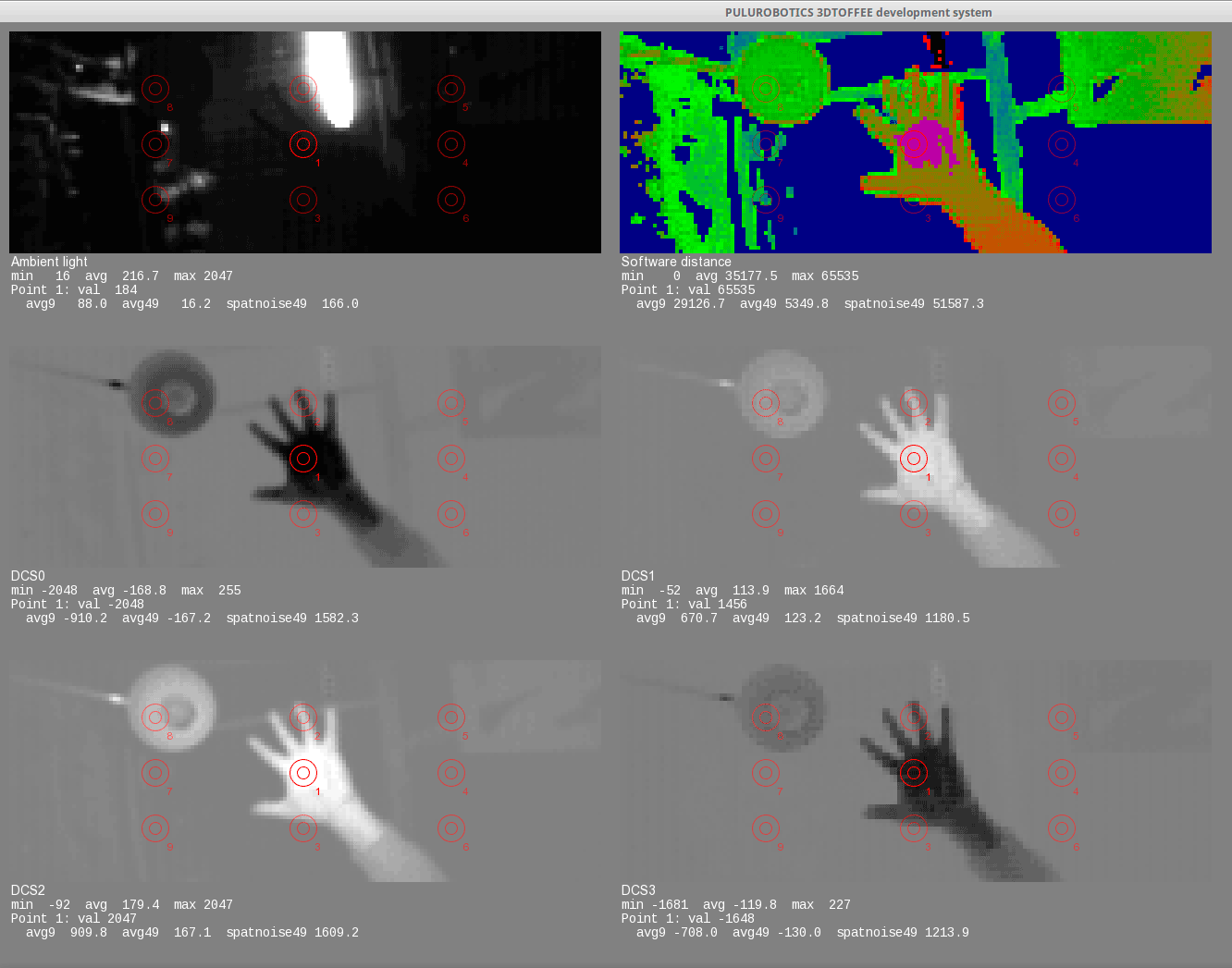
It works!
Recycling here an old image from previous posts, but you get the point: It works!