PuluTOF Raspberry Pi hat - "38400 range finders" in one system
live 3D vision around your project

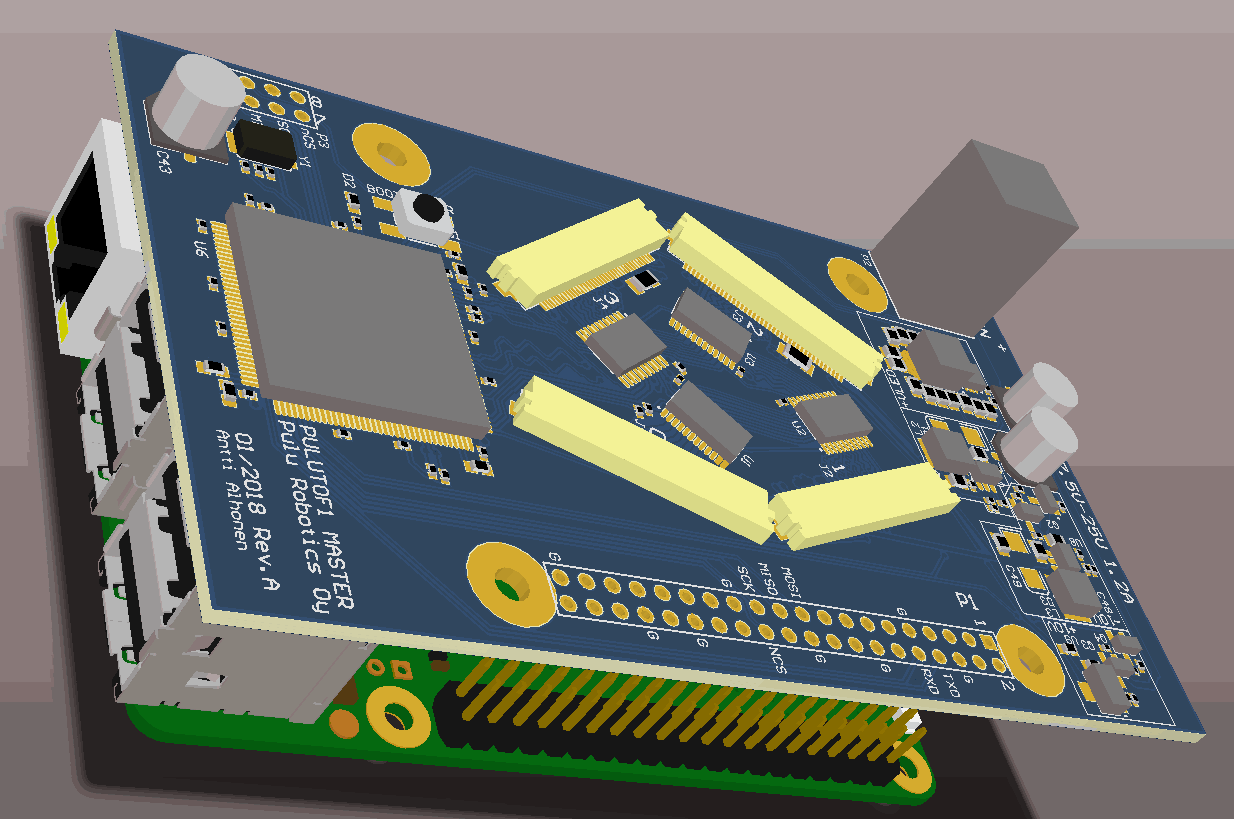
PuluTOF1 Master - Raspberry Pi Hat
Weird looking placing with connectors is to avoid bending flex cables. This board is in the middle of robot. Sensors can be found at the end of flex cable. You should see wiring inside the circuit board. It looks like Amazon; each wire should be the same length! Tell me about miniature wire spaghetti!
Four flex connectors connect PuluToF sensors that are placed at the corners of the robot.
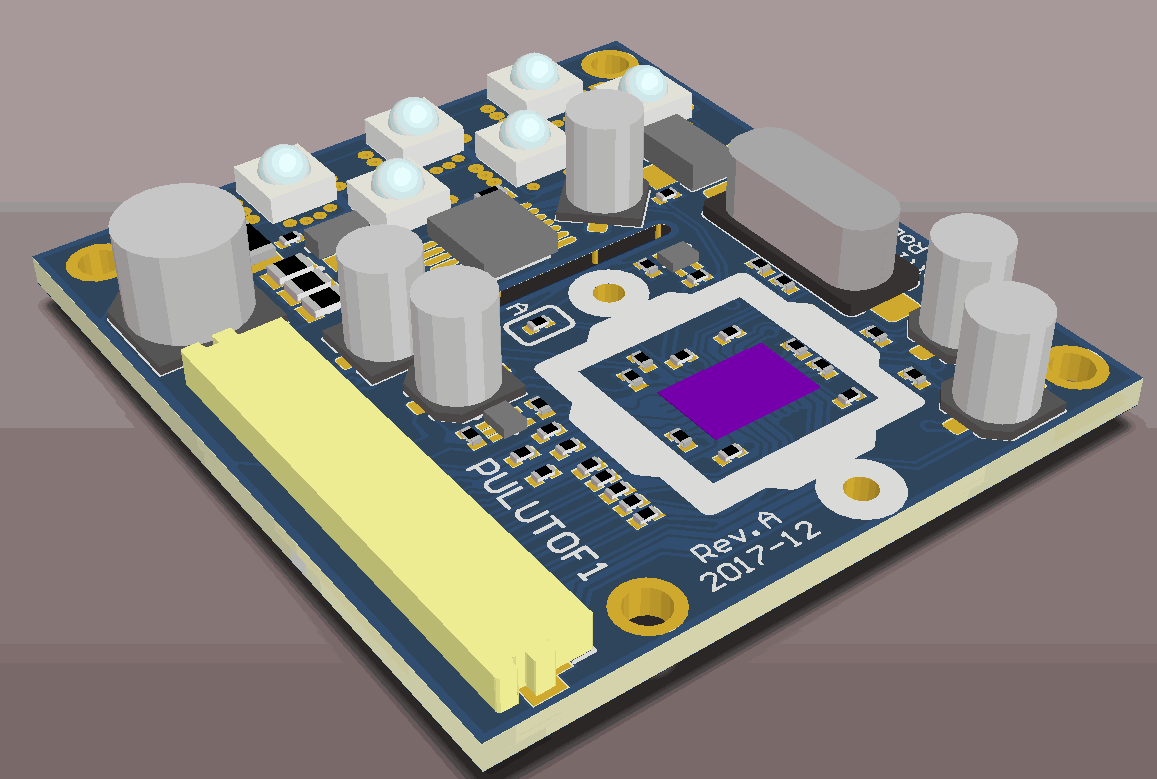
PuluTOF1 - sensor
Sensor is placed in plastic casing providing sufficient protection and attachment points. Sensor has 10W of peak optical infrared LED power.
Size of the sensor is around 40x40x40mm.
Optics is not shown in the picture. Purple square is the sensor chip, 50 microns thick. Antti soldered the second prototype chip by hand under a microscope with hot air blower. The silicon wafer is so delicate it shatters if you put it on your fingertip!
How do we know?
Well... there was that first chip...
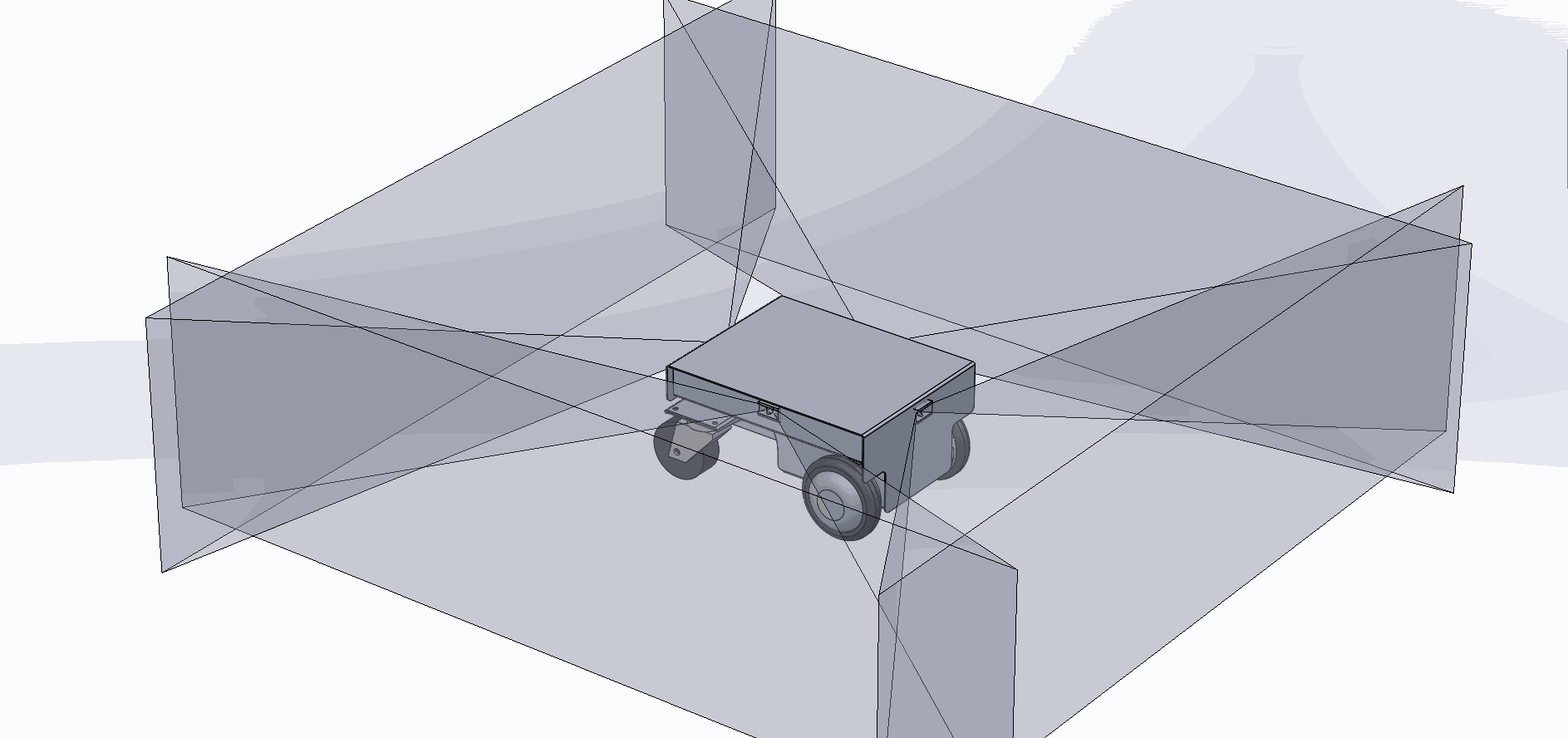
Vision works providing sufficient information
around the robot in real time. Navigation algorithm gets the information within a few milliseconds, meaning it can do obstacle avoidance and other critical decisions very fast.
We plan to produce two models of Pulu S. Model S-4 would be like in the picture, S-10 would be - no surprise - with 10 sensors providing 110 degree vertical image around the machine. Latter can see staircases and perhaps fountains. Water surface is challenging to any sensor.
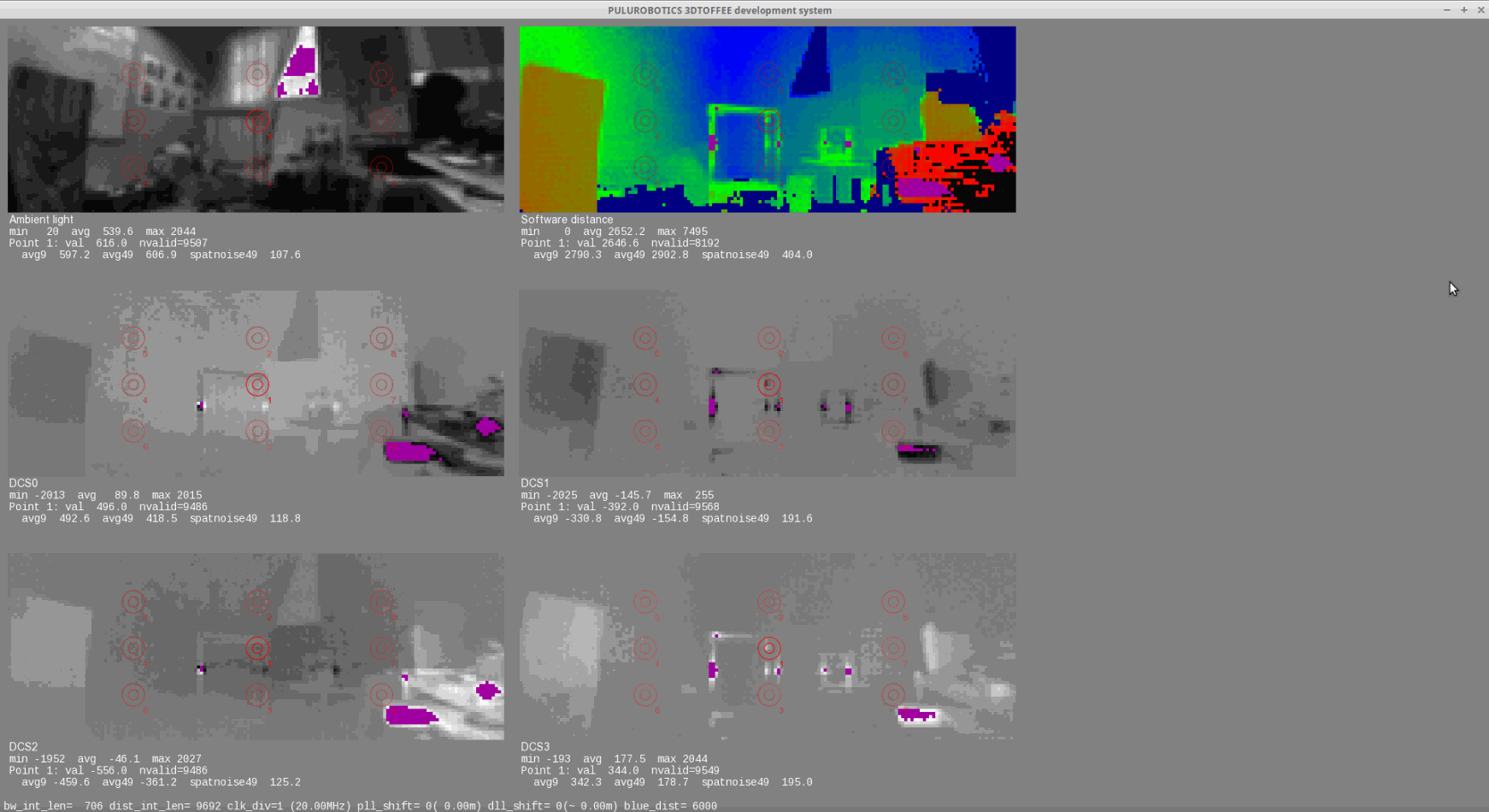
What does it see?
Left top corner of the image shows low resolution B&W image.
Top right corner shows distances with different color.
What happens here?
The sensor board is pulsing 20MHz LED light
the sensor sees the light reflecting from space illuminated, and sends the information to STM32
STM32 calculates phase difference and determines the distance for each pixel.
The sensor works like laser range finder with a lot of measurement points!