Pulurobot M
ROS yhteensopiva, muttei käytä ROSsia
(Erittäin tehokas liiketoiminnassa, ylläpidossa tai valmistuksessa)

Kotelo on koottu alumiinista
-
Niitattu yhdeksi tukevaksi palaksi
-
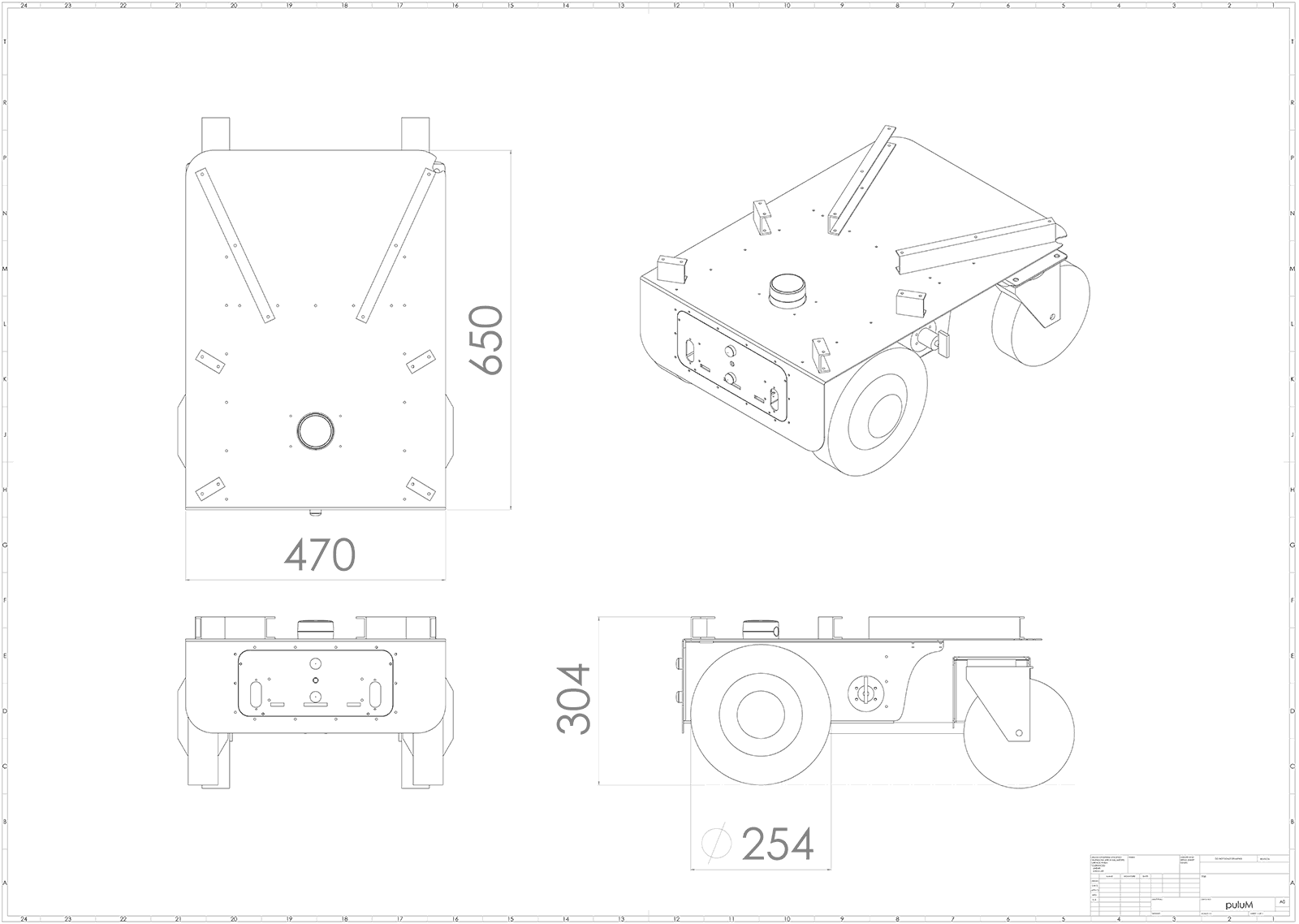
Koko 650mm x 470mm + kotelon korkeus 230mm, korkeus maanpinnasta 304mm
Moottorit
-
2 kpl 300w 24v BLDC -napamoottori
Jousitus
-
Vapaasti pyörivät jousitetut takapyörät
-
Aina neljä pyörää maassa
-
Vakaa kyyti, ei horjuvaa painopisteen siirtymistä kuten jousittamattomissa rakenteissa.

Robotti on sovellusalusta
DIN kokoionen robotti on yksinkertainen alusta jonka päälle voi rakentaa sovelluksen. Lähettipoikasovellus voi viedä kuusi muuttolaatikkoa (600x400mm) tai kaksitoista postilaatikkoa (400x300mm).
Akku
-
Rakennettu 18650 li-ion kennoistahaluttuun kapasiteettiin, oletus 240Wh -
Paino ainut rajoittava tekijä
-
Kotelon sisään mahtuu noin 1KWh
Laturi
-
elektroniikka robotin sisällä
-
seinälaturi 110V/220V
Sensorit
-
LIDAR navigointiin ja kartoitukseen
-
4 x 3D TOF-kameroita, kykenee näkemään myös suorassa auringonvalossa
-
sonar läpinäkyvien esteiden havaitsemiseen
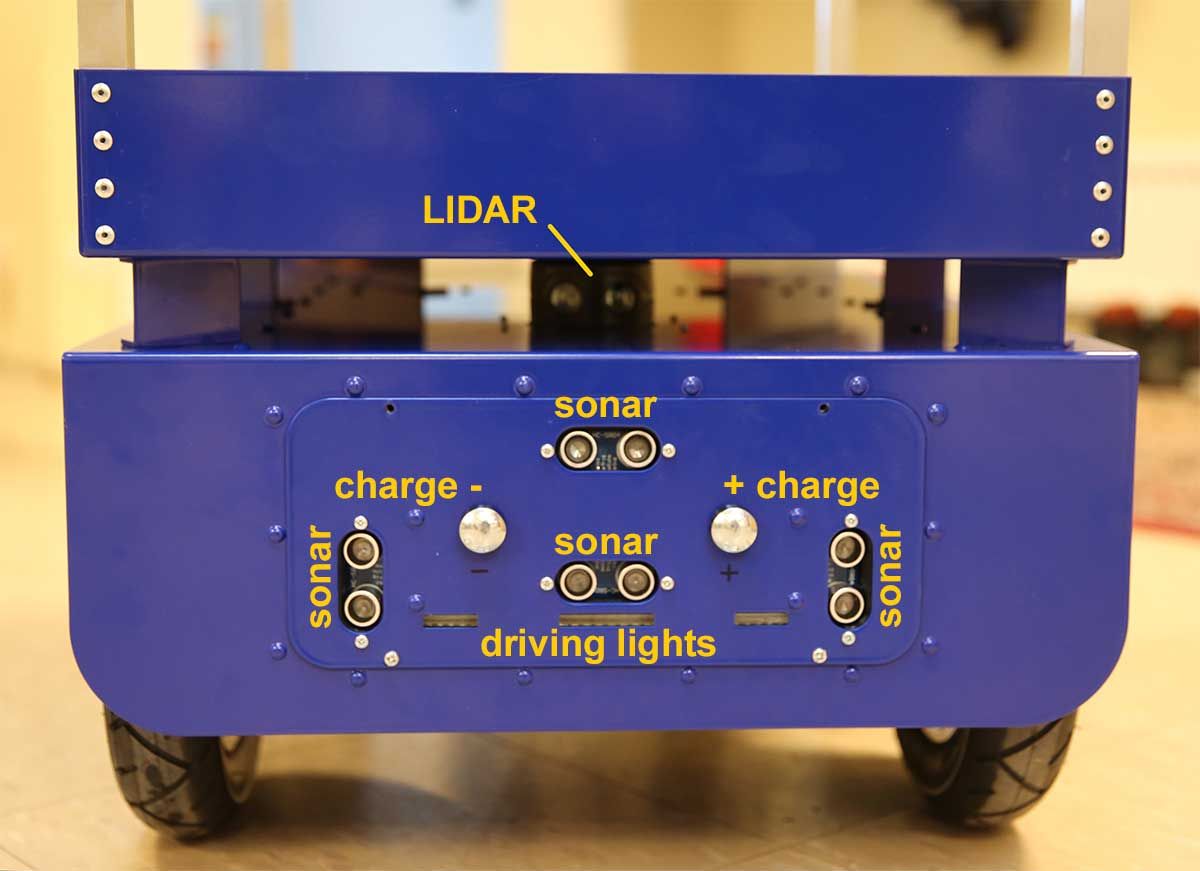
Sensoriasetelma
Nykyisessä Pulu M versiossa on kolmentyyppisiä antureita;
-
2D LIDAR kartoitusta ja navigointia varten
-
3D Time Of Flight (PuluTOF) havaitsee esteet korkeammalta kuin 2D LIDAR
-
Sonarit läpinäkyvien esteiden havainnointiin (lasiovet)
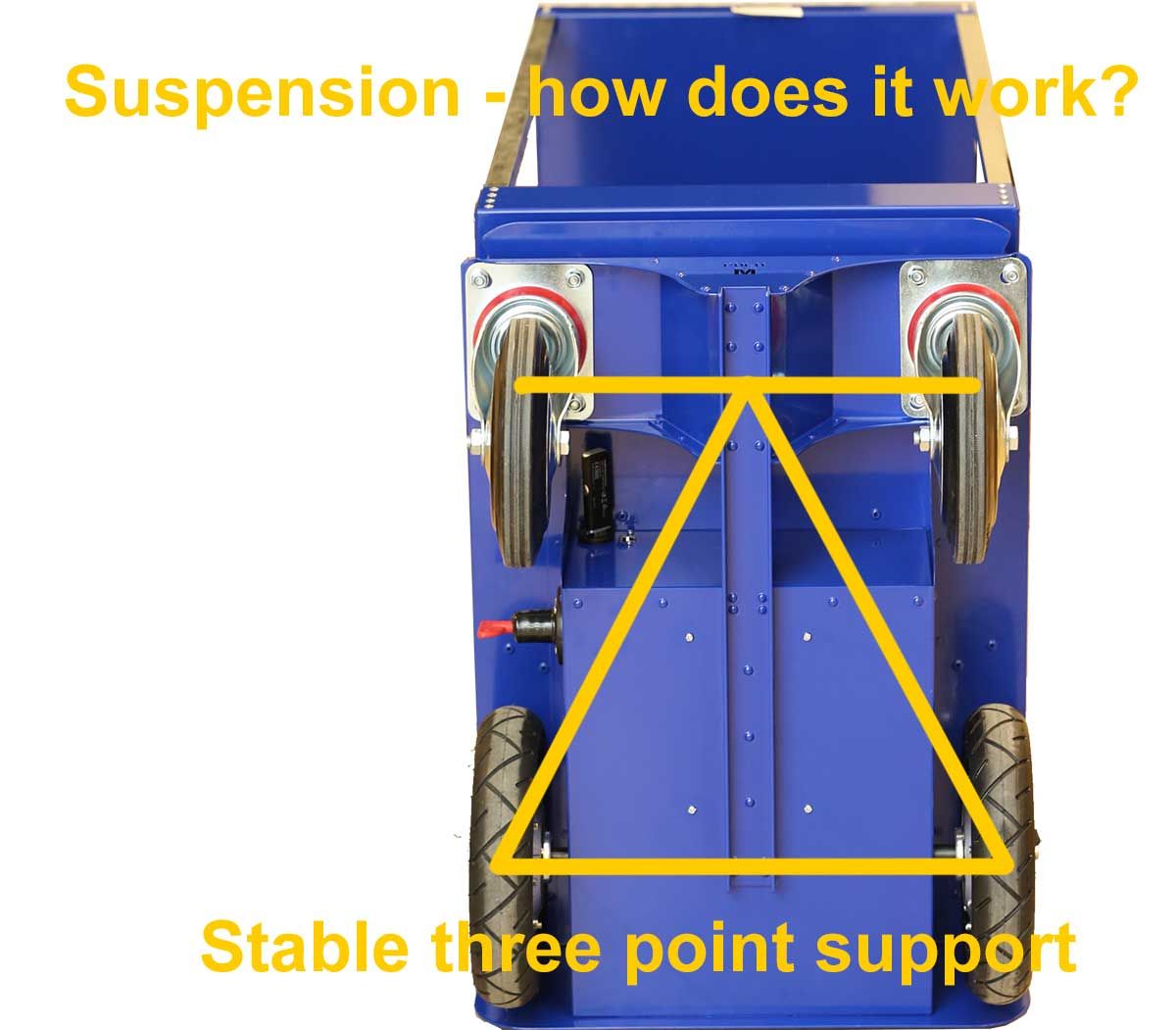
Älykäs ja kestävä jousitus
Neljä pyörää maassa koko ajan. Kestävä ja supersimppeli jousitus on tuttu kuorma-autoista. Valmistettu samalla tekniikalla millä lentokoneet kootaan.
Kovilla pinnoilla kaikki neljä pyörää pysyvät maassa. Voit ajaa Pulu M:llä myös sorateillä, ainut rajoitus on renkaiden pito.
Kaikki Pulurobotit käyttävät samaa rakennetta. Renkaat muodostavat kolmion. Kun jousitusvara loppuu, se voi nojata kotelon reunaan aivan kuten jäykkä nelipyörärakenne.
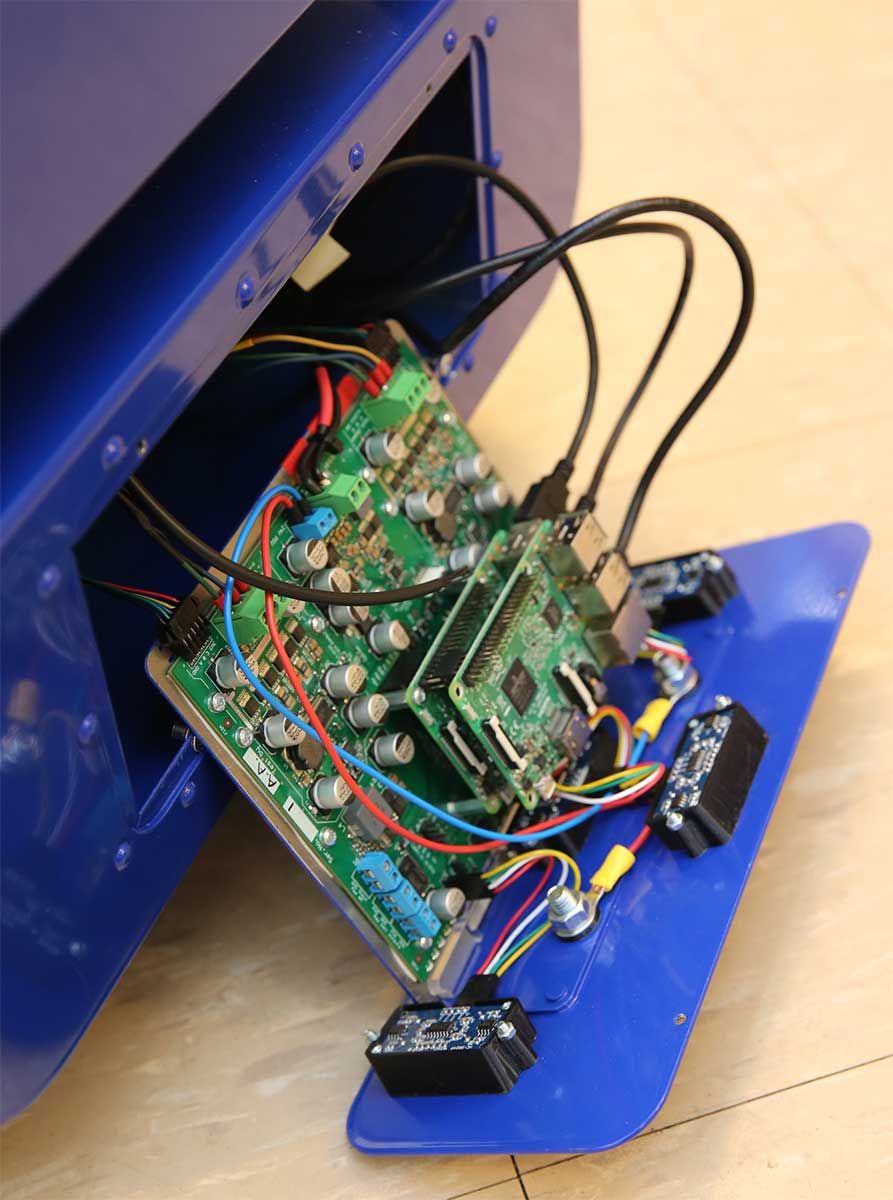
Kaikki-samalla-levyllä
RobotBoard on kiinnitetty etuluukkuun.
Kaikki elektroniikka on yhdessä paikassa. Tämä tekee huollosta ja valmistamisesta edullista.
Huomaa kaksi Raspberry Pi:tä RobotBoardin päällä. Tähän voi laittaa enintään viisi Raspberryä. Pulu M tarvitsee vain yhden suunnistamiseen ja viestintään, mutta jos tarvitset enemmän, se on mahdollista.
 Sarjanumero leimataan ennakoimaan autonomisille roboteille tulevaa rekisteröintipakkoa.
Robot Identification Number
- robotin tunnistenumero löytyy kotelosta.
Sarjanumero leimataan ennakoimaan autonomisille roboteille tulevaa rekisteröintipakkoa.
Robot Identification Number
- robotin tunnistenumero löytyy kotelosta.Pulurobotit on rakennettu kestämään
Fysiikan lait muuttuvat harvakseltaan. Tämän takia mekaaninen rakenne on tehty kestämään. Alumiini on maankuoren yleisin metalli. Se on kestävää, helposti muokattavaa ja kevyttä. Niittaus on helposti korjattavissa ja perusteellisesti lentokoneissa testattu kiinnitystapa.
Aivan kuten lentokone, Pulurobot seuraa yksinkertaisuuden ja kestävyyden periaatetta.
Pulverimaalattu alumiini on korroosion- ja kulutuksenkestävää. Pinnoite voi olla minkä tahansa värinen, matta tai kiiltävä, jopa ESD jos tarvitaan.
Elektroniikka on helposti päivitettävissä ruuvaamalla luukku irti ja vaihtamalla se.
Tulevat päivitykset tullaan tarjoamaan tällä tavalla. Jos tarvitset lisää tehoa tai halut vain päivittää viimeisimpään RobotBoardiin, se ei ole vaikeaa. Päällä olevaa sovellusrakennetta ei tarvitse tämän takia purkaa.
Kontrolleri:
-
STM32 mikrocontrolleri sensoreille ja matalan tason navigointiin
-
MEMS gyro, kiihtyvyysanturi ja kompassi
-
Tehokas litiumion -laturi (100W)
-
Tehokas 5V virtalähde tietokoneille ja tableteille (10A)
-
2 x BLDC moottoriohjainta, 700W hetkellistä tehoa
-
Raspberry Pi kartoittaa (SLAM) & ajaa reitinhakua
-
Internetyhteys WiFi ja/tai 3G/4G
Näkö & tuntoanturit
-
2D 360 asteen LIDAR
-
4pcs 3D Pulu TOF - Time-of-Flight anturi
-
4 pcs Sonareita lasipintojen tunnistamiseen
Kotelo:
-
Niitattu alumiinikotelo
-
Yksinkertainen, edullinen superkestävä jousitus: aina neljä pyörää maassa
-
Kaksipyöräveto, BLDC napamoottorit, kuten hoverboardeissa
-
Kestää ainakin 90kg kun liikkuu, mekaaninen rakenne kestää paljon enemmän
Lataus:
-
Löytää ja asettuu laturiin automaattisesti
-
100W sisäänrakennettu laturi
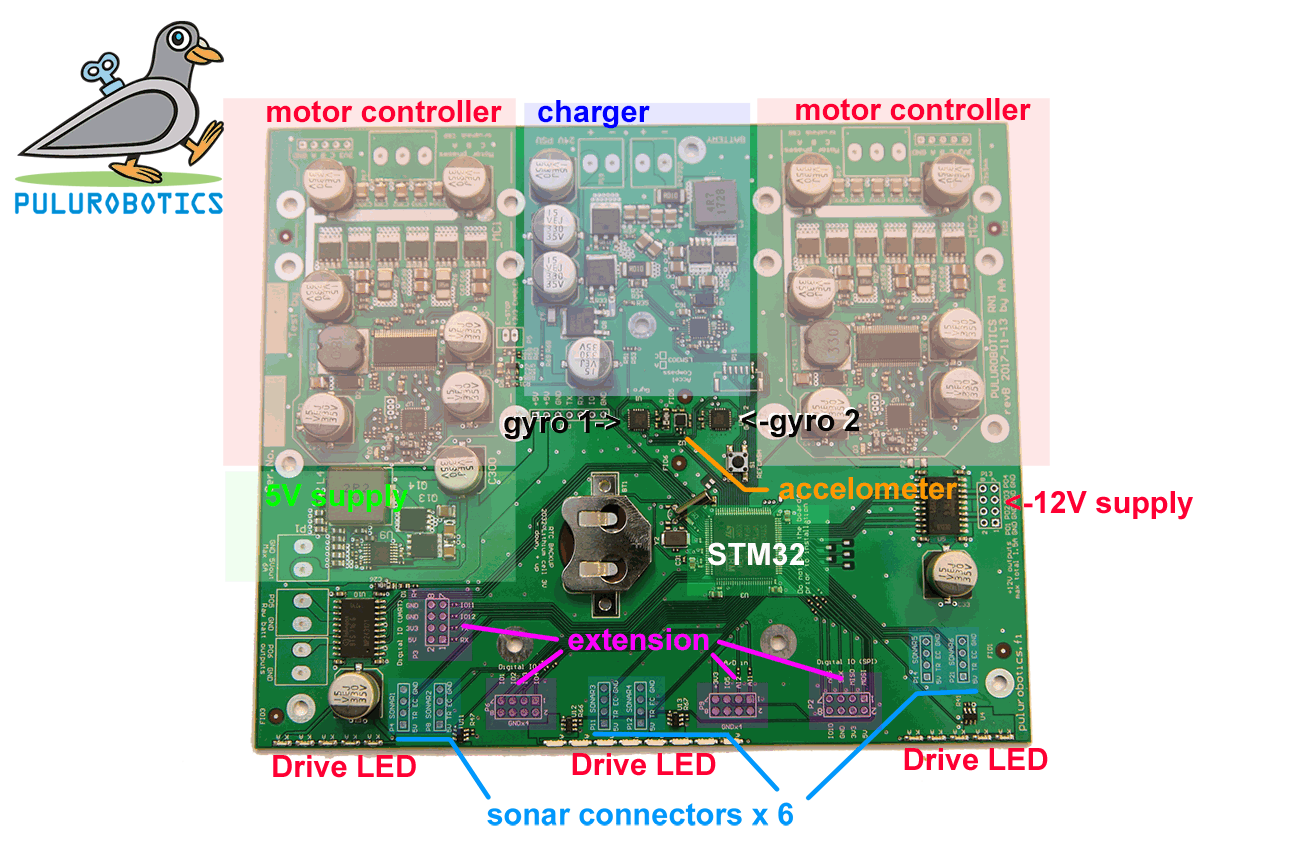
RobotBoard, tehokas 32 bit ARM Microkontrolleri (STM32),
-
Kaikki-samalla-levyllä RobotBoard, ei johtospagettia!
-
helppo valmistaa, helppo huoltaa = edullinen!
-
Ohjaa kahta harjallista tai harjatonta tasavirtamoottoria
-
Piikkiteho 700w / moottori, jatkuva teho 200w / moottori
-
Liitin Raspberry Pi 2/3, mahdollisuus liittää jopa viisi Raspberry Pi:tä
-
RobotBoardissa on I2C, SPI, UART, GPIO ja alalogisia input -liitäntöjä vapaana
-
Tehokas 100W li-ion laturi
-
kompassi, 2 x gyro ja kiihtyvyysanturi
-
Paristovarmennettu reaaliaikakello (RTC)
-
Jopa 20 vapaata IO porttia
-
5V, 12V ja raaka akkujännite (16-21V) sovellus- ja lisälaitekerrokselle
RobotBoardissa on I2C, SPI, UART, GPIO ja alalogisia input -liitäntöjä vapaana
Tehokas 100W li-ion laturi
kompassi, 2 x
Jopa 20 vapaata IO porttia
5V, 12V ja raaka akkujännite (16-21V) sovellus- ja lisälaitekerrokselle
Kätevä koko, kykenee kuljettamaan raskaita kuormia
Robotti on suunniteltu sopimaan kotiin tai toimistoon. Useimmat robotit suunnitellaan pyöreiksi. Tämä ei ole optimiratkaisu, koska useimmat tavarat rakennuksissa ovat muodoltaan suorakaiteita - Talot, huonekalut, pakkaukset.
Tämän takia suunnittelimme koko robotin DIN -kokoisen laatikon alle. Myös navigointi osaa kuljettaa suorakaidetta tilassa. Se tietää koska pitää peruuttaa tai kääntyä päästäkseen haluamaansa paikkaan osumatta esteisiin.
We took human footprint shoulder high because that fits into most human space.
Rakenteellisesti kotelo kykenee kuljettamaan paljon enemmän kuin 90 kiloa. Olemme testanneet robotin 118 Kilolla ilman ongelmia.
Kaikki neljä pyörää ovat aina maassa. Kumpi pää on etu- kumpi takapää? Sinä päätät.
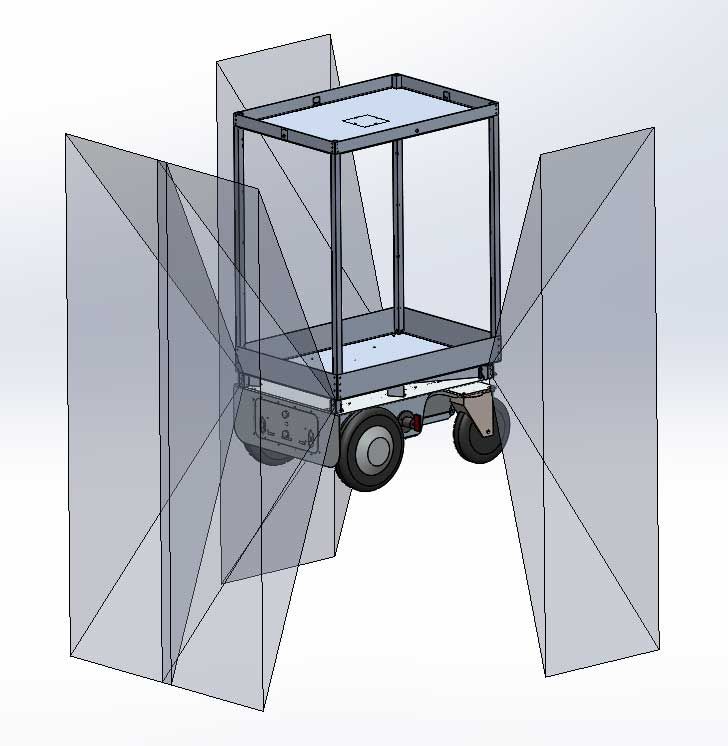
Rajoitettu LIDAR & 3D TOF versio
Nykyinen tuotantomalli Pulu M:stä tarjoaa hybridin 3D TOF kameroilla ja LIDARilla.
Neljä kapeaa mutta korkeaa näkymää erottavat esteet, pöydät, kynnykset, portaikot, kuopat - miltei mitä hyvänsä joka uhkaa robotin kulkua.
Suurin haaste suorakaiteen muotoisessa pohjakuvassa on laskea missä robotin takapää menee. Kuten kuvasta näkyy, sensorien asettelu mahdollistaa kummankin takareunan havainnoinnin.
Tämä malli on saatavilla, toimitusaika noin kaksi kuukautta.
Pyydä tarjous: info@pulurobotics.fi